
工程所给出的足式机器人是经典的单腿三自由的度末端点接触结构。 那我们在规划末端状态的时候就可以不用考虑末端姿态,只要考虑末端点位置就可以了。 三自由度刚好可以末端位置在任务空间种的要求。 所谓逆向运动学就是在任务空间的位置和姿态映射到关节空间。 一般的多自由度关节机器人进行逆向运动学规划,需要进行违逆迭代求解逆向运动学,有一定的运算量。当然对于这种三自由度的串级关节腿部,有也可以利用余弦定理和三角恒等式来进行求解。但是这样子的求解一般都针对了特定的膝关节朝向。 工程demo中所使用的是违逆迭代的数值求解方法,接下来看详细的推导过程。
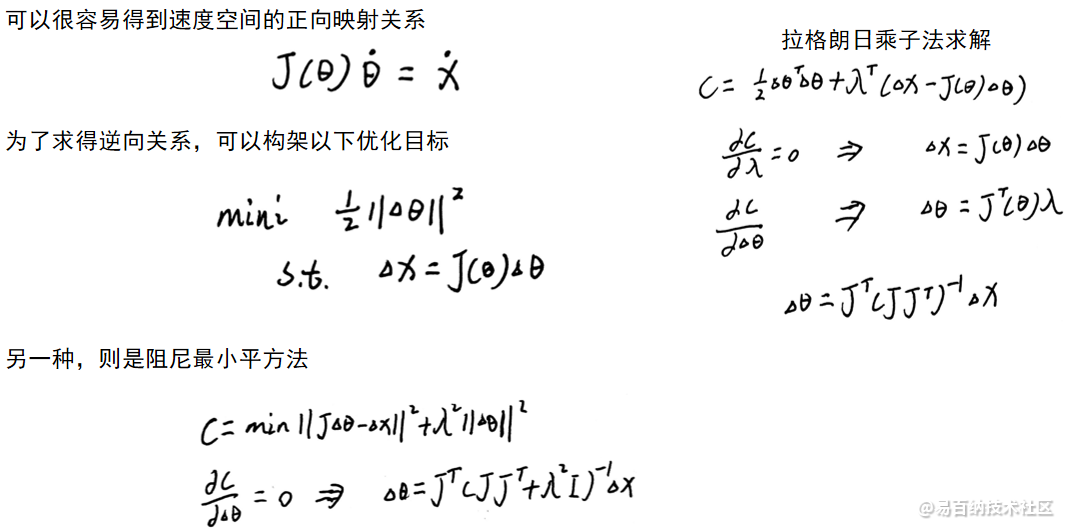 以一个腿为例,由于我们只要求三轴位移空间,且只有三个自由度,对应的雅可比矩阵是 3X3的。 可以得到一个关节角速度到任务空间速度的映射。 以离散的角度来看,在任务空间中,期望位置和当前位置有很小的误差,需要在关节空间求解一个很小的关节增量。 以最小化角度增量来看,服从离散的正向关系,通过拉格朗日乘子法求解可以得到最终的右伪逆矩阵。 需要注意的是,这中解法适合当前这种三自由度的腿部系统,如果是大于3个自由度,那么将不适用。 该式对角度规划没有进一步约束,有可能会导致多个角度状态到达边界,没办法正常跟踪轨迹。
Minimum Jerk轨迹
以一个腿为例,由于我们只要求三轴位移空间,且只有三个自由度,对应的雅可比矩阵是 3X3的。 可以得到一个关节角速度到任务空间速度的映射。 以离散的角度来看,在任务空间中,期望位置和当前位置有很小的误差,需要在关节空间求解一个很小的关节增量。 以最小化角度增量来看,服从离散的正向关系,通过拉格朗日乘子法求解可以得到最终的右伪逆矩阵。 需要注意的是,这中解法适合当前这种三自由度的腿部系统,如果是大于3个自由度,那么将不适用。 该式对角度规划没有进一步约束,有可能会导致多个角度状态到达边界,没办法正常跟踪轨迹。
Minimum Jerk轨迹
以左式为目标,通过 欧拉 拉格朗日方程求解得到 L 的解, 由于L的解非常简单,所以进行多重积分后可以得到一个很有规律的式子,就是时域的五次多项式轨迹,而且只要确定6个系数即可。
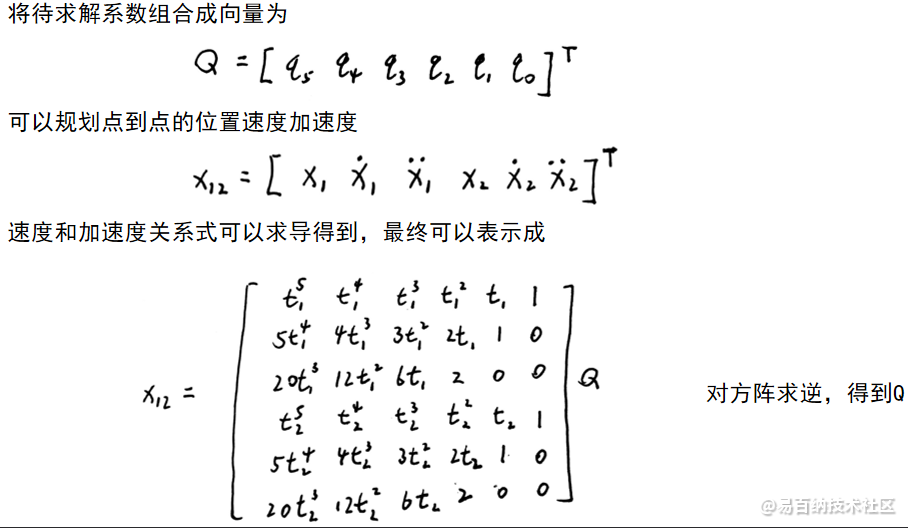
我们可以把这个6个待求解系数组成一个向量Q。 这里先讨论两个点,由x1点到x2点可以分别指定 位置 速度 和 加速度 由于求解6次样条曲线都需要满足这两个点,并且是从 t1 到 t2 ,那么可以对应X12向量可以得到一个 6X6的矩阵。 解说前三行,可以发现第二行是对于 6次多项式求一阶导数,第三行是求得二阶导数。 X12和6X6方阵都是已知的,那么只要对方阵求逆就可以得到向量Q。 如此以来,6次多项式就可以被确定,轨迹描述为 在t1时从x1出发,在t2时刻到达x2点,且端点的速度和加速度都被确定。
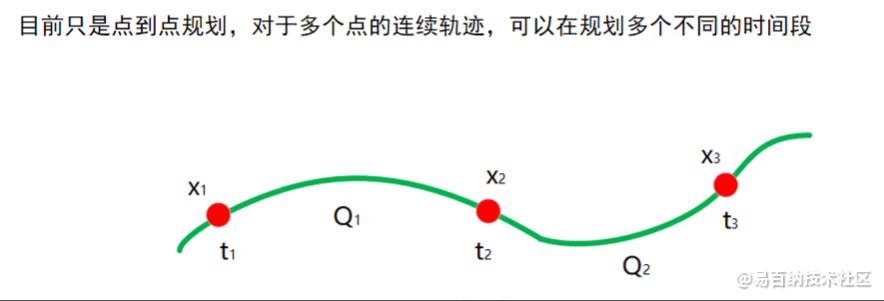
那么,现在就自然诞生一个问题,多点和多维度的轨迹如何解决。 多点轨迹其实非常同意解决,把一段段轨迹接起来,对每段轨迹都得到一个 Q, 在不同时间段计算不同的轨迹时间函数即可。 多维度轨迹也可以用很简单的思想,比如,对于XYZ轴每一个维度 分别计算样条函数。计算完毕后再拼成一个向量。 这样子的过程,在工程demo中已经专门写成了一个文件,可以很方便进行调用。
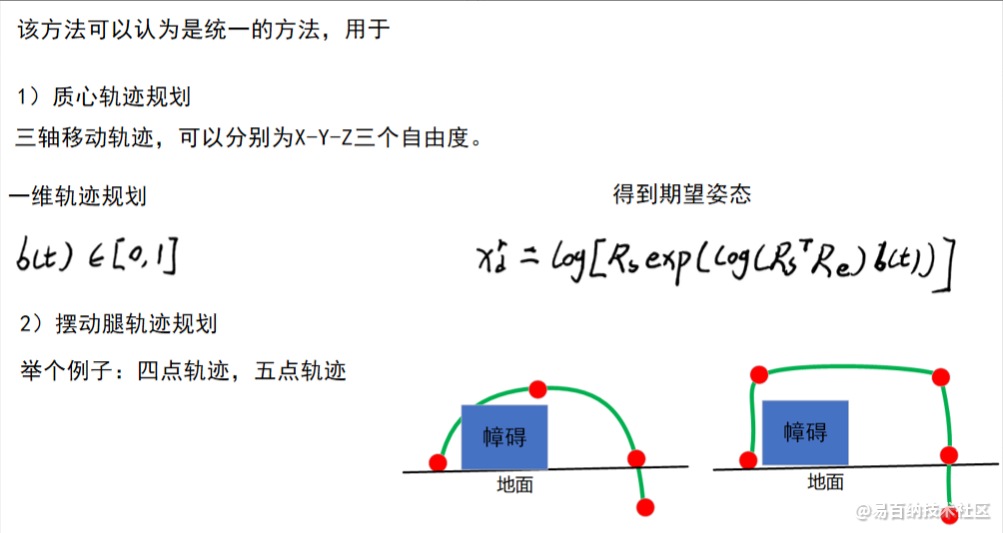 Minimum jerk 轨迹在我的工程demo中其实是统一的方法。不仅仅用在质心轨迹规划,也包括了摆对腿部轨迹规划部分。 对于质心轨迹规划,XYZ轴位移分了三个维度处理。 对于姿态部分只用了一个维度来处理,且范围是0到1,其实就是百分比的意思。 期望姿态可以观察右式,可以发现先从李群映射到向量空间得到误差向量,再乘以百分比后指数映射到李群,考虑初始的状态,再对数映射到向量空间后可以得到一个当前时间下的rpy向量。 摆动腿轨迹,在实际环境中是要考虑地形和障碍的。此处仅限于平地进行讨论。 摆动腿的轨迹,有很多种。比如有 使用摆线轨迹的,使用二次函数的,使用B样条的,有使用三次样条的。 但就目前主要考虑的摆动轨迹的作用主要是可以跨越障碍,因此不考虑步态和整体控制方法,其使用什么样的轨迹并不是很重要。 在工程中同样使用minimum jerk 轨迹规划摆动轨迹。那么只要定义三个点就可以确定。但是由于无法感知地形,还有一些其他干扰因素,导致理想的最终点可能不会完全接触地面。 所以要额外的补上一节。摆动腿运动的截至状态就是末端被认为是接触了地面。这一点在工程通过touch sensor 来判断。 所以一段摆动轨迹规划,可以有四个点。当然也可以有五个点,五个点更加接近于一个方形。因为,圆弧轨迹在跨越障碍时,可能末端在未到达最高点时就会碰撞。为了简化这部分逻辑可以先将就使用五点方形轨迹。
Minimum jerk 轨迹在我的工程demo中其实是统一的方法。不仅仅用在质心轨迹规划,也包括了摆对腿部轨迹规划部分。 对于质心轨迹规划,XYZ轴位移分了三个维度处理。 对于姿态部分只用了一个维度来处理,且范围是0到1,其实就是百分比的意思。 期望姿态可以观察右式,可以发现先从李群映射到向量空间得到误差向量,再乘以百分比后指数映射到李群,考虑初始的状态,再对数映射到向量空间后可以得到一个当前时间下的rpy向量。 摆动腿轨迹,在实际环境中是要考虑地形和障碍的。此处仅限于平地进行讨论。 摆动腿的轨迹,有很多种。比如有 使用摆线轨迹的,使用二次函数的,使用B样条的,有使用三次样条的。 但就目前主要考虑的摆动轨迹的作用主要是可以跨越障碍,因此不考虑步态和整体控制方法,其使用什么样的轨迹并不是很重要。 在工程中同样使用minimum jerk 轨迹规划摆动轨迹。那么只要定义三个点就可以确定。但是由于无法感知地形,还有一些其他干扰因素,导致理想的最终点可能不会完全接触地面。 所以要额外的补上一节。摆动腿运动的截至状态就是末端被认为是接触了地面。这一点在工程通过touch sensor 来判断。 所以一段摆动轨迹规划,可以有四个点。当然也可以有五个点,五个点更加接近于一个方形。因为,圆弧轨迹在跨越障碍时,可能末端在未到达最高点时就会碰撞。为了简化这部分逻辑可以先将就使用五点方形轨迹。
免责声明:文章内容来自互联网,本站仅提供信息存储空间服务,真实性请自行鉴别,本站不承担任何责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:云恒制造:四足机器人质心准静态控制器(三) https://www.bxbdf.com/a/19689.shtml