这里直接跳过了安装VMwave的步骤,开始SDK的编译。
一、SDK编译部分
SDK包建议选择V2.2.5版本36G。
在sdk根目录下执行“./build.sh cleanall”,然后执行“sudo apt-get update”,等待完成
后再执行“sudo apt-get upgrade”,最后执行下面命令来安装一些所需文件
“sudo apt-get install repo gitk git-gui gcc-arm-linux-gnueabihf u-boot-tools device-tree-compiler
gcc-aarch64-linux-gnu mtools parted libudev-dev libusb-1.0-0-dev python-linaro-image-tools
linaro-image-tools autoconf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make
binutils build-essential gcc g++ bash patch gzip gawk bzip2 perl tar cpio python unzip rsync file bc
wget libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync
openssh-client subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev
expect fakeroot cmake flex bison liblz4-tool libtool keychain expect-dev ”我这里已经安装过了所需的文件,所以就不截图了。
安装完成后在工程的根目录下执行命令“source envsetup.sh”会出现很多选项,选择
rockchip_rv1126_rv1109,也就是【90】接着在工程的根目录下执行 “./build.sh lunch”,这时会出现很多
选项,选择BoardConfig-aybering.mk。【6】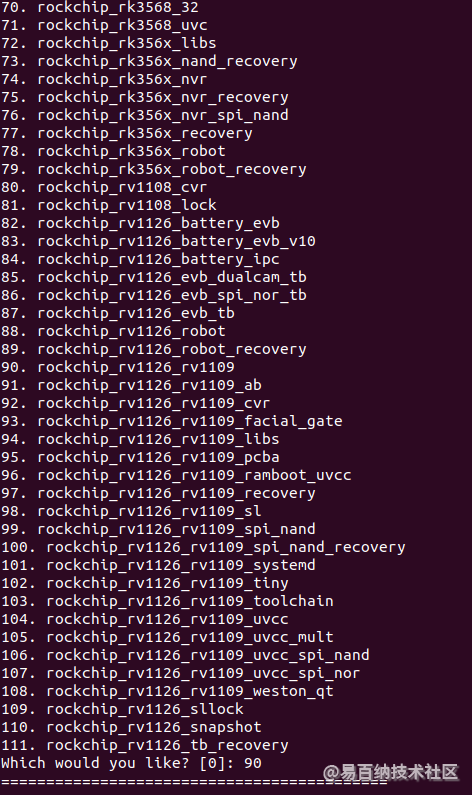
在完前提操作下在工程根目录下执行命令“./build.sh”
如果编译报错,后面的U-boot编译也报错,可以参考此文章。
https://www.ebaina.com/articles/140000015184U-Boot 编译
(1)u-boot 配置说明使用 menuconfig 配置 U-Boot,选择需要的模块,最后保存退出。
rv1126_defconfig 文件在目录 u-boot/configs
命令格式:make “RK_UBOOT_DEFCONFIG”_defconfig
RK_UBOOT_DEFCONFIG 定义在./build.sh 选择的 BoardConfig*.mk
先进入压缩包目录然后按照以下命令
cd u-boot
make rv1126_defconfig
make menuconfig保存配置到对应的文件 rv1126_defconfig
make savedefconfig
cp defconfig configs/rv1126_defconfig
(2)U-Boot 编译
进入到压缩包根目录执行./build.sh uboot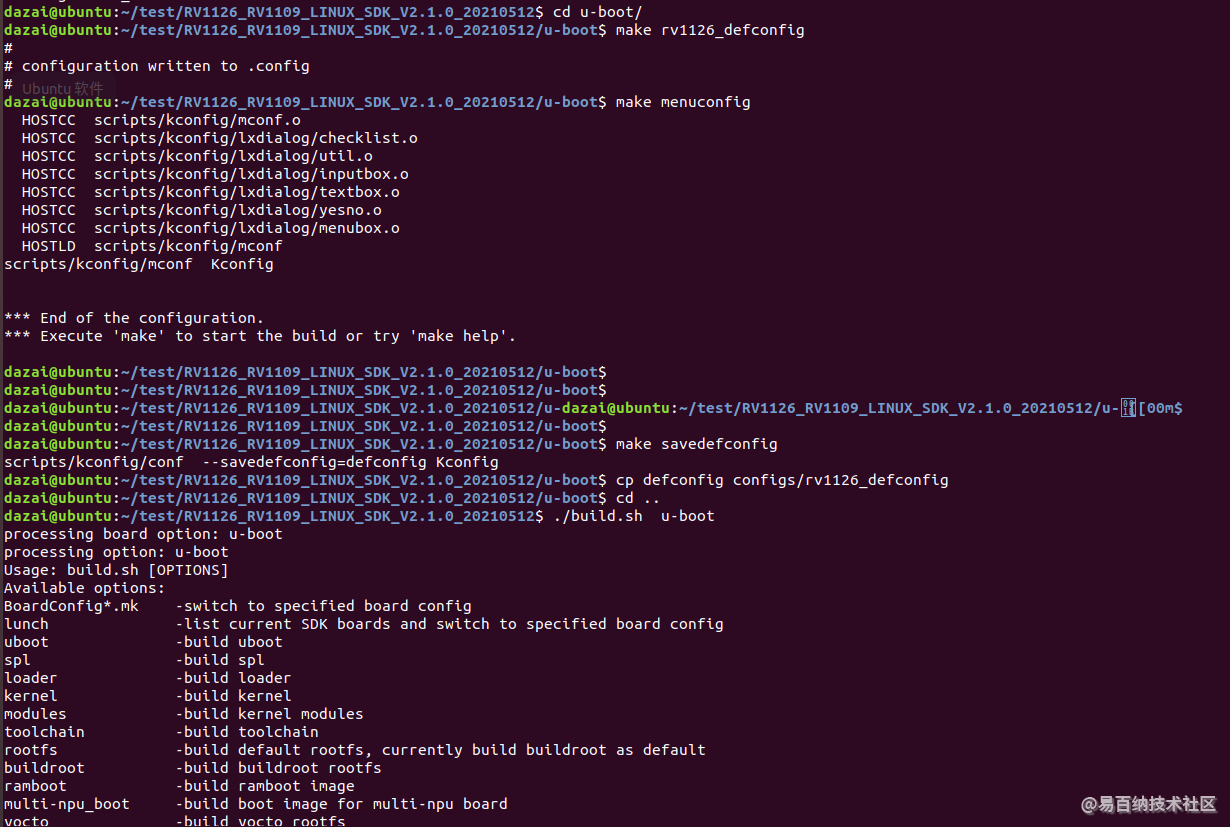
Kernel 编译
(1)Kernel 配置说明
执行以下命令前先保证处在工程根目录下
./build.sh device/rockchip/rv1126_rv1109/BoardConfig-aybering.mk
cd kernel命 令 格 式 : make ARCH=arm “RK_KERNEL_DEFCONFIG”
“RK_KERNEL_DEFCONFIG_FRAGMENT” ### RK_KERNEL_DEFCONFIG 和 RK_KERNEL_DEFCONFIG_FRAGMENT 都定
义在./build.sh 选择的 BoardConfig*.mk、RK_KERNEL_DEFCONFIG_FRAGMENT 是可选项,具体看 BoardConfig*.mk
配置。
make ARCH=arm rv1126_defconfig
make ARCH=arm menuconfig //执行完后会出现下图
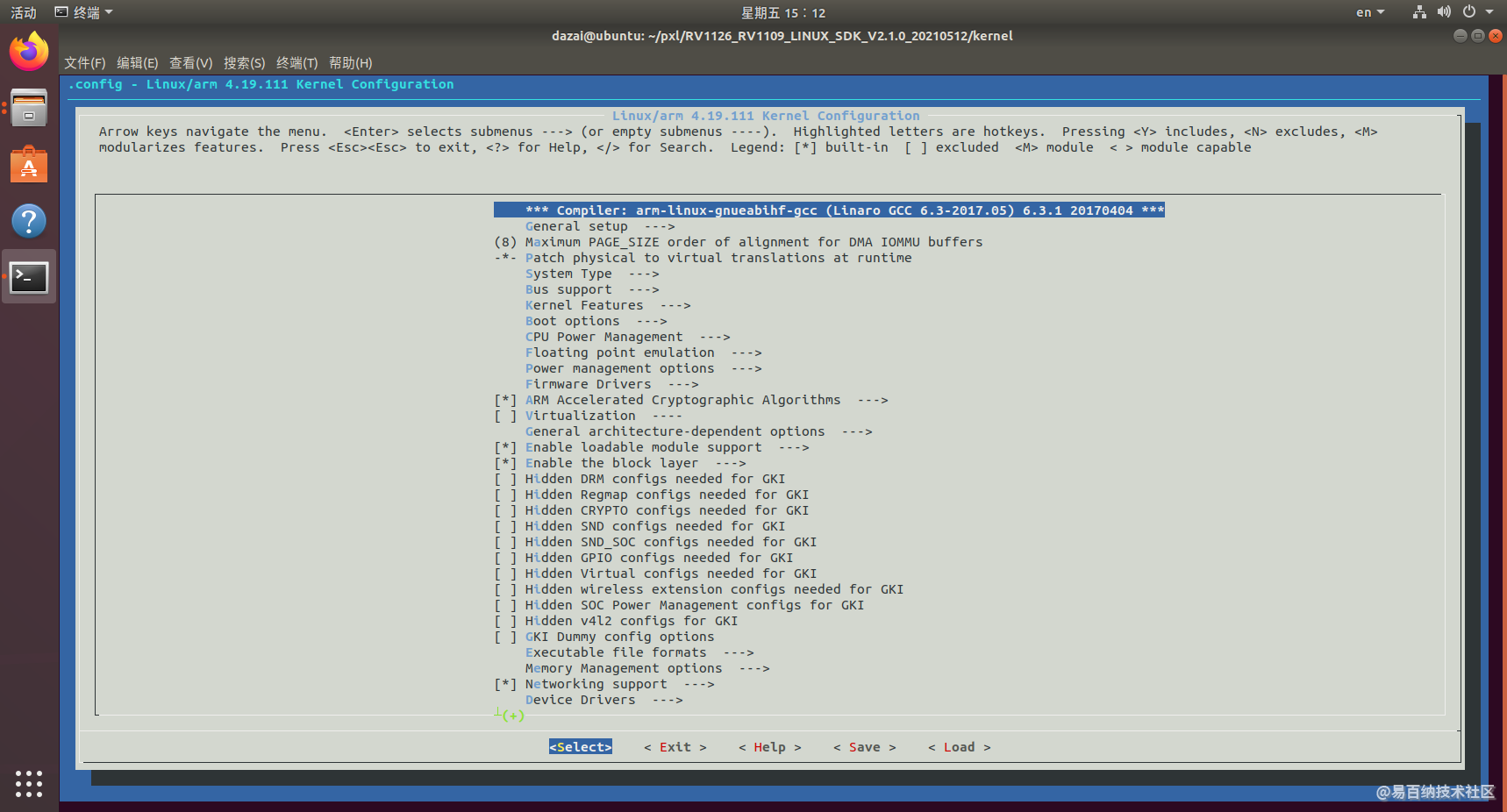
make ARCH=arm savedefconfig
cp defconfig arch/arm/configs/rv1126_defconfig
(2)Kernel 编译
执行下面命令之前要保证在工程根目录下
./build.sh kernelRootfs 编译
(1) 目录 app 和 external 里的工程编译方法以及 Rootfs 配置说明1. 先 SDK 根目录查看 Board Config 对应的 rootfs 是哪个配置
./build.sh -h rootfs
###Current SDK Default [ rootfs ] Build Command
source envsetup.sh rockchip_rv1126_rv1109_spi_nand
make
2. source buildroot 对 应 的 defconfig
source envsetup.sh rockchip_rv1126_rv1109
3. 使用 menuconfig 配置文件系统,选择需要的模块,最后保存退出。
例如:ipc-daemon 的配置是 BR2_PACKAGE_IPC_DAEMON (查看
buildroot/package/rockchip/ipc-daemon/Config.in)
make menuconfig # 进入 menuconfig 后,按“/“进入查找模式,输入
BR2_PACKAGE_IPC_DAEMON4. 保存到 rootfs 配置文件
./buildroot/configs/rockchip_rv1126_rv1109_defconfig
make savedefconfig
(2)Rootfs 编译查看 Rootfs 详细编译命令
./build.sh -h rootfs
Rootfs 编译命令
./build.sh rootfs
二、 固件部分
1、驱动
2、瑞芯微开发工具

在./build.sh编译完成后,工程目录下的 rockdev 下会生成相关文件,把 rockdev 文件夹
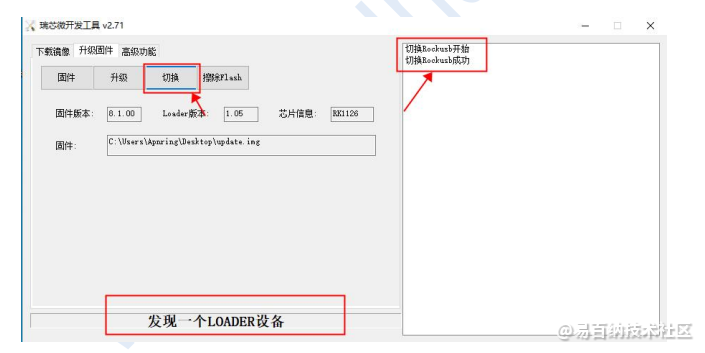
拷贝到windows 环境下,打开瑞芯微开发工具,工具页面介绍如下图所示:
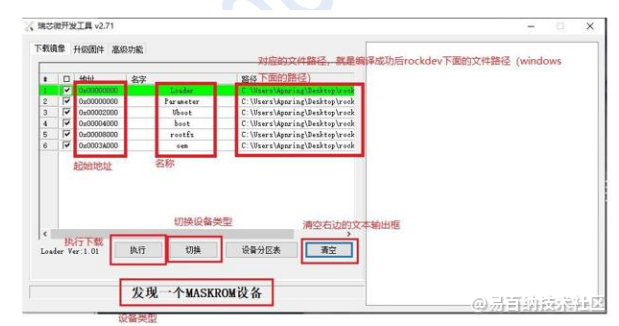
安装驱动,电源线接好,用USB线连接后,刚开始会显示为发现一个ADB设备,照以下步骤即可:
先点击切换
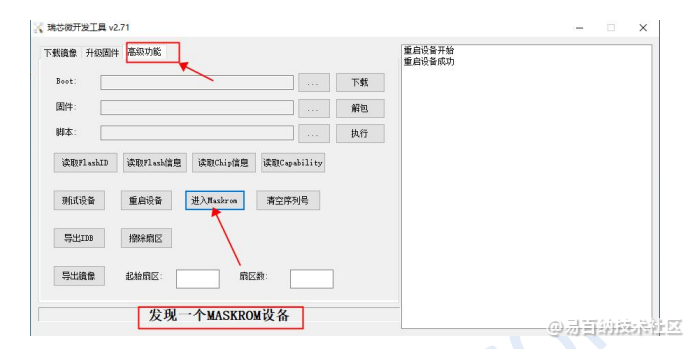
然后点击高级功能->进入Maskrom
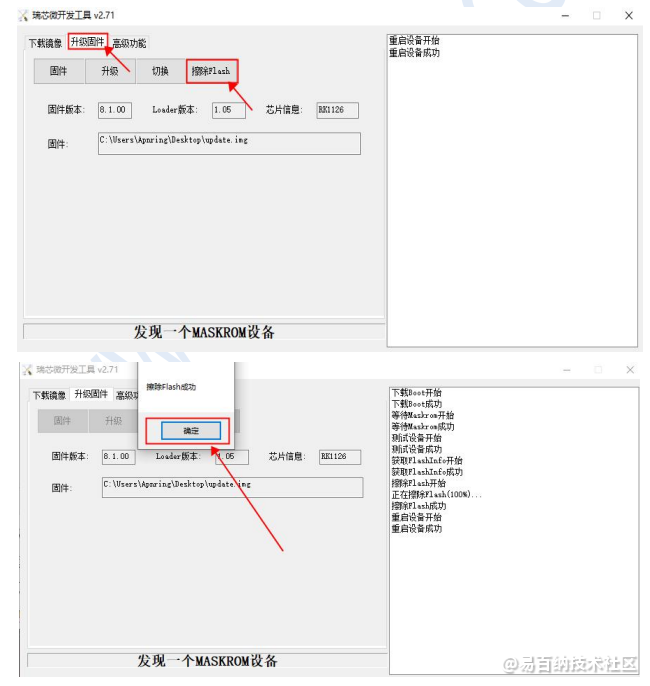
点击升级固件->擦除flash
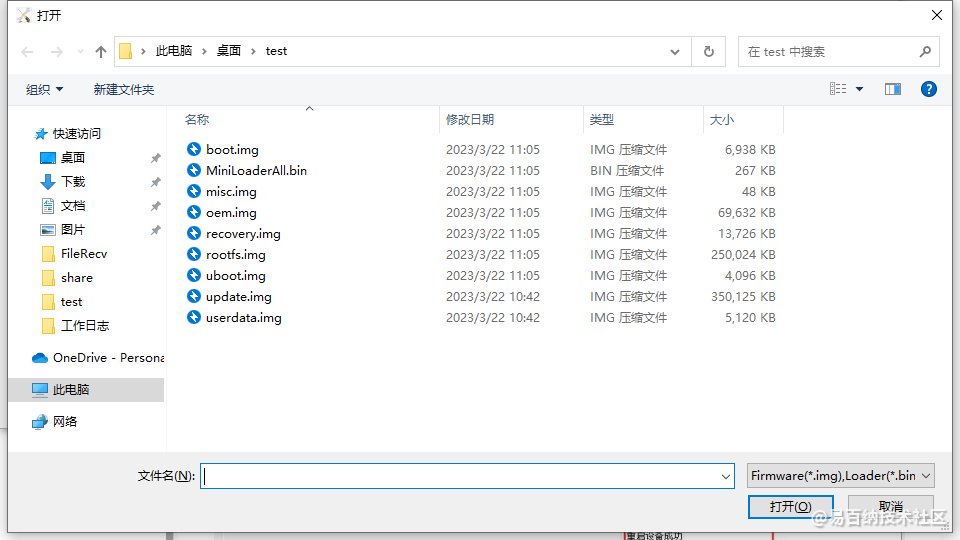
再点击固件,选择update.img
最后点升级
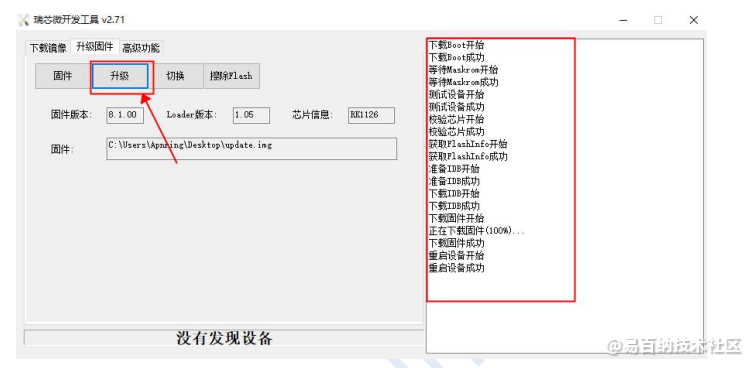 下载好了之后会重启设备,等待再次出现发现一个ADB设备之后就可以进行下一步了。
下载好了之后会重启设备,等待再次出现发现一个ADB设备之后就可以进行下一步了。
3、安装adb
下载解压后,将五个文件拷贝到C:\Windows\System32:如下图所示:
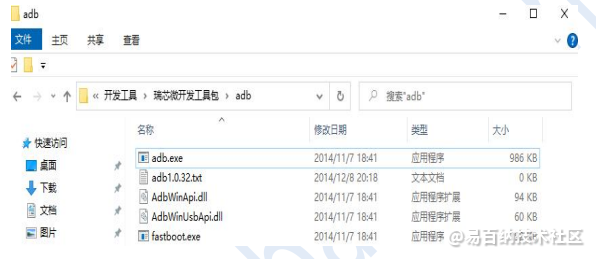
将这4个文件拷贝至C:/Windows/System,如下图所示:
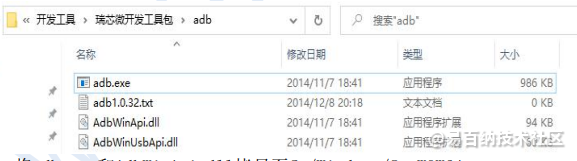 将adb.exe和AdbWinApi.dll拷贝至C:/Windows/SysWOW64
将adb.exe和AdbWinApi.dll拷贝至C:/Windows/SysWOW64
用win+r唤醒运行窗口,输入adb shell,如果出现下图,证明安装成功(确保USB连接好adb才能打开)
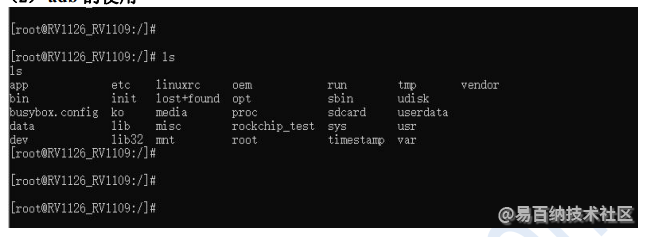
安装好了之后可以上传/下载文件。
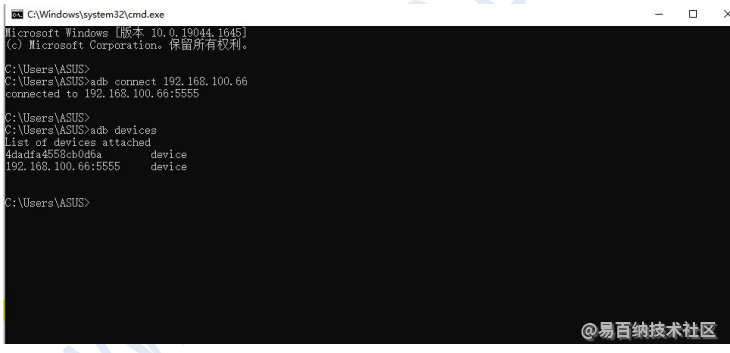
先win+r 打开运行窗口,输入cmd。
然后输入
adb connect 192.168.1.159(自己板子的IP)
adb devices(检查是否连接成功)
从 PC 端上传文件 test-file 到 EVB 板的目录/userdata
adb -s 192.168.1.159:5555 push test-file /userdata/
下载 EVB 板上的文件/userdata/test-file 下载到 PC 端
adb -s 192.168.1.159:5555 pull /userdata/test-file test-file
Ps:从板端传文件到pc端,未指定传输路径,默认传到当前目录下4、安装secureCRT

端口需检测是否一样。账号是root,密码是rockchip。
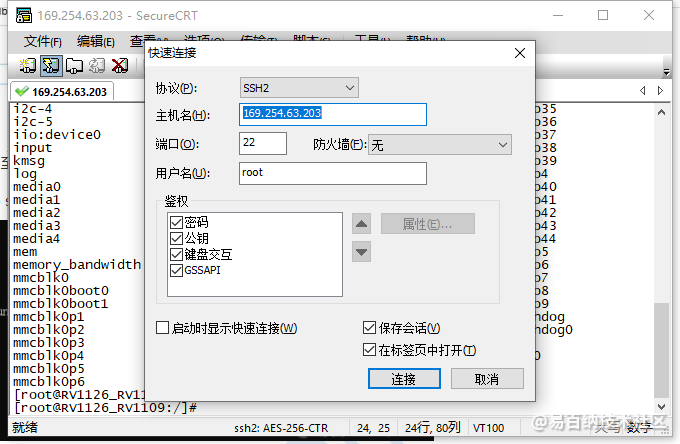
连接成功后如图:
5、Ubuntu NFS服务器设置和启动
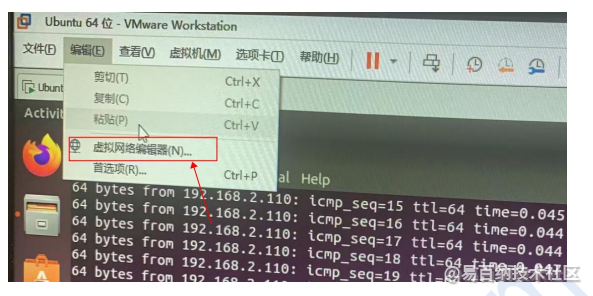
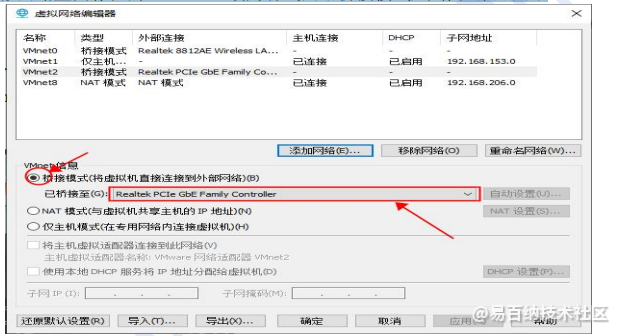
设置有线网卡桥接模式
(1)点击虚拟机网络编辑器
(2)将虚拟网路里面存在的VMnet2 ,改为有线网络桥接模式/不存在添加网络
(3)点击虚拟机选择设置,点击添加,选择网络适配器,点击完成
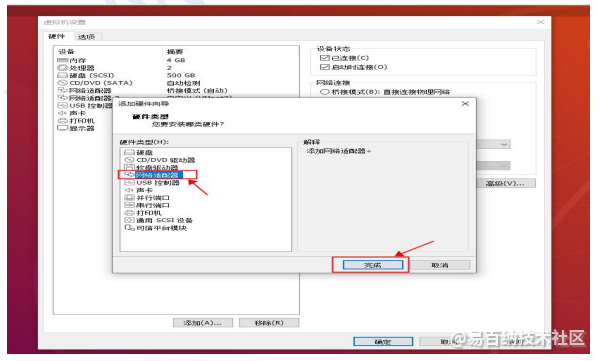
(4)在已经添加的网络适配器中选择自定义,选择VMnet2(桥接模式),或者添加自己设置的其他虚拟网络有线桥接模式,点击确定

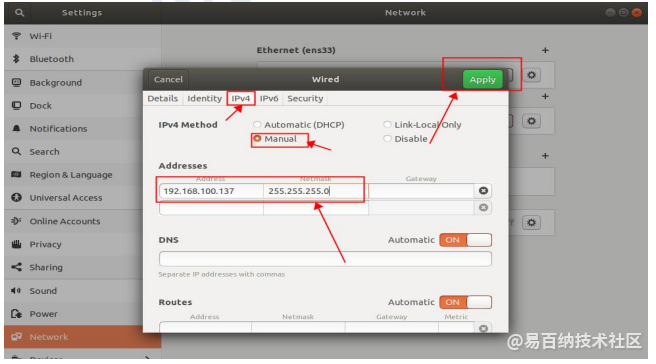
(5)点击ubuntu菜单栏,点击设置选项,选择Network,选择自己设的第二个虚拟网络,滑动打开网络,点击设置

(6)进 入 设 置 选 择 ipv4 , 点 击 Manual , 填 写 设 置 的 ip 和 Netmask ( ip 和 板 端 网 段
192.168.100. 一致,Netmask:255.255.255.0),最后点击Apply
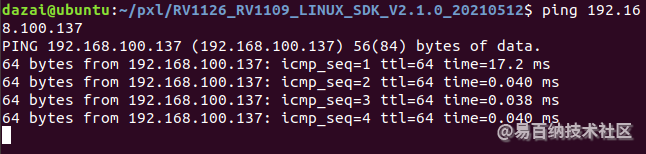
(7)验证设置的桥接虚拟网络 ping 192.168.100.137(ping的是自己设置的桥接的有线
网卡的ip),如下图所示,说明验证的网络是通的
(8)ubuntu18.04安装NFS并启动NFS
终端输入指令:sudo apt install nfs-kernel-server
(9)在ubuntu 18.04 下创建一个和mont 共享的文件夹 mkdir Nfs(文件夹名随意),然
后重启NFS服务器,重启NFS服务器命令:sudo /etc/init.d/nfs-kernel-server restart

(我已经创好了)

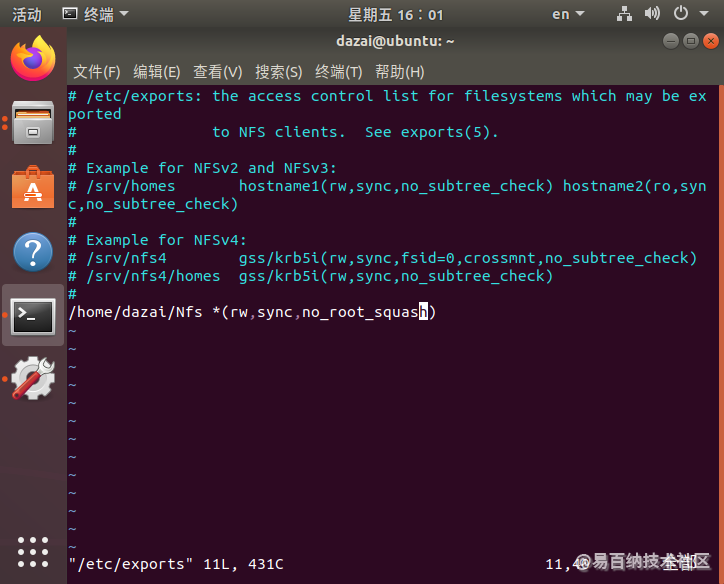
(10)修改配置文件,命令行输入 sudo vim /etc/exports,然后在配置文件里面添加:
/home/hao/Nfs (rw,sync,no_root_squash),注意:添加的/home//根据自己创建的填写,
如下图所示:
(11)再次重启sudo /etc/init.d/nfs-kernel-server restart,启动NFS服务器,命令行输
入 sudo /etc/init.d/nfs-kernel-server status
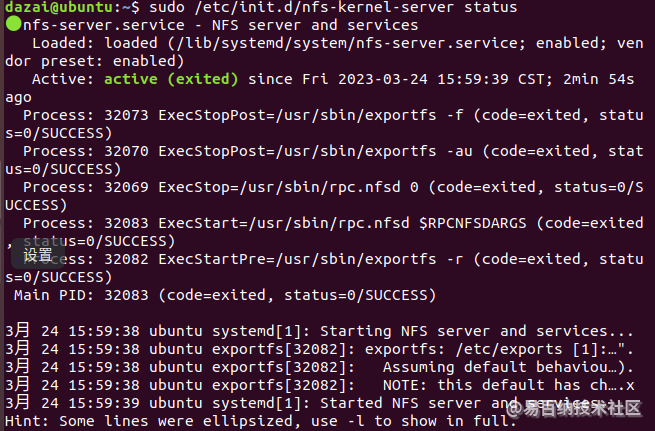
实现nfs的功能
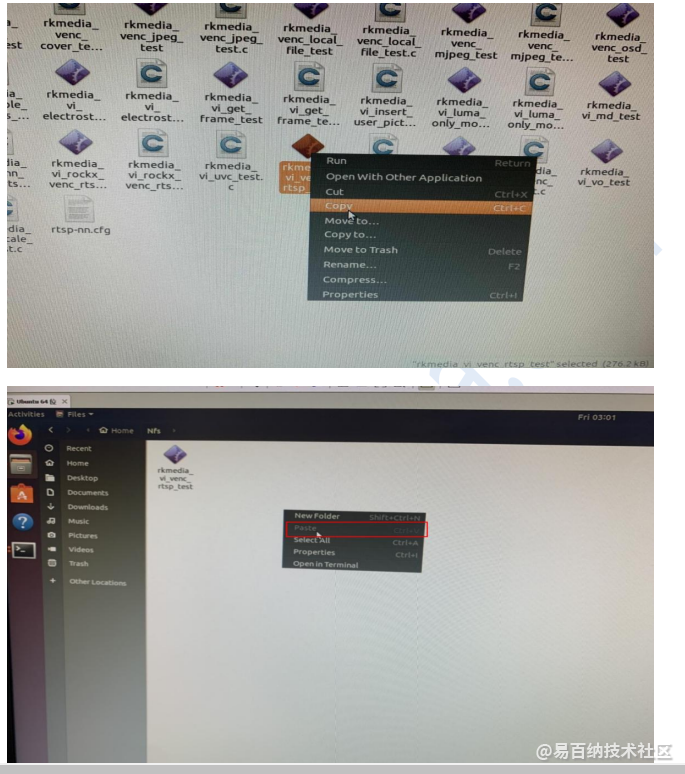
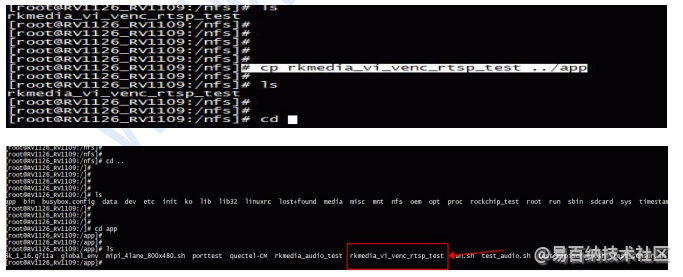
(1)将运行的视频流可执行文件拷贝给/home/dazai/Nfs(home//根据自己创建的)
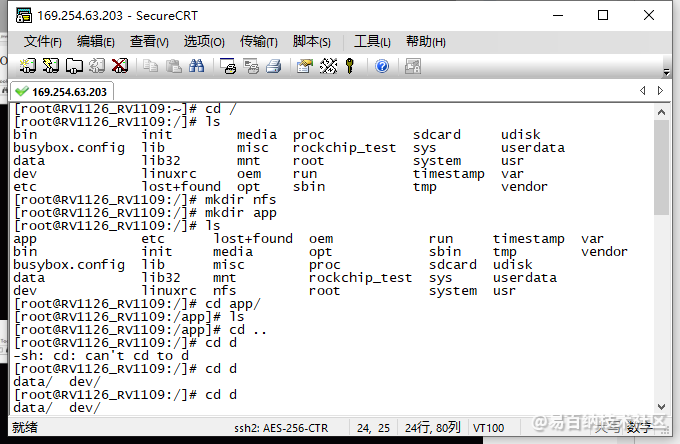
(2)cd/,ls 进入ssh 连接显示终端的根目录,如下图所示:
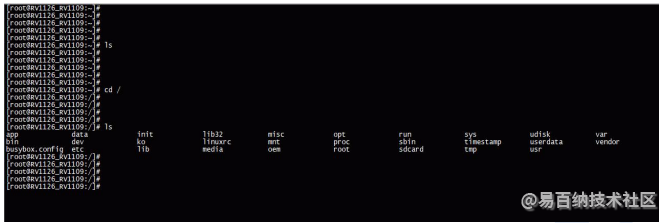
(3)在板端根目录创建nfs文件夹(文件名随意,此文件夹用来接收共享的文件)图如下:

(4)板端挂载命令:mount -t nfs 192.168.100.137:/home/hao/Nfs /nfs -o nolock挂载成功图如下:
没有app文件夹可以自己创建
单摄(GC2053)测试单摄(GC2053)测试:
先安装好VLC软件

接法:
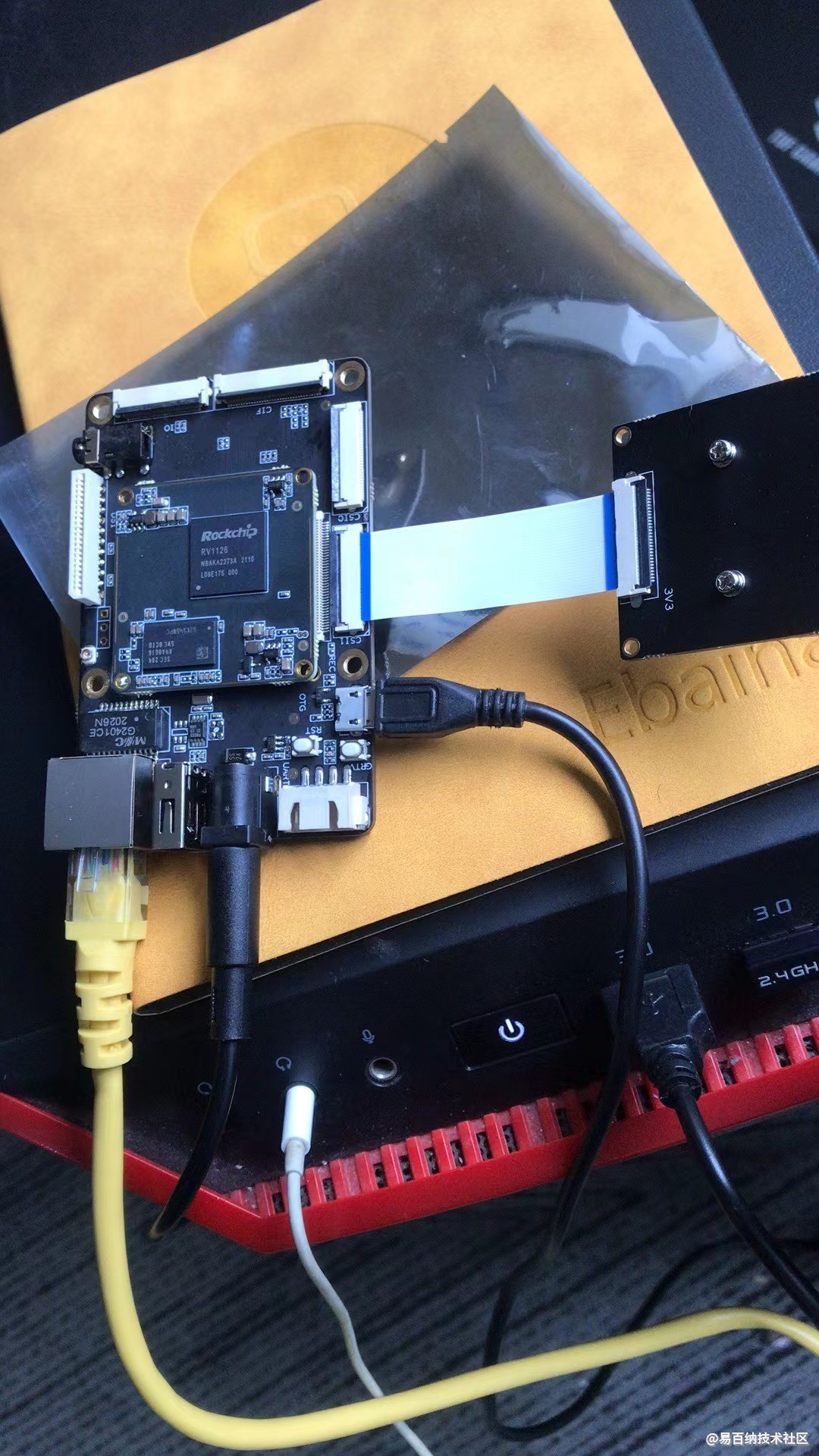
可以使用dmesg |grep 415 或者dmesg |grep 2053命令检查设备信息(用的是哪个型号就用哪个命令,如IMX415就用第一个)。
第一步:进 入 sdk 文 件 夹 , 在 内 核 目 录 下 修替换 .dts和.dtb 的 设 备 树 文 件
cd ./A191/rv1126_rv1109_linux_sdk_v1.8.0_20210224/kernel/arch/arm/boot/dts文件链接:https://pan.baidu.com/s/1bkMrPFRuoDsm3MJ8TPEVCg
提取码:daza
替换后到根目录编译(./build.sh)
第二步:根据步骤烧入固件
第三步:取流的测试demo不需要修改该所以也不需要编译去视频流的可执行文件,然后根据(目录7)将取流的可执行文件传给板子
第四步:运行可执行文件,单摄取流成功如图下:
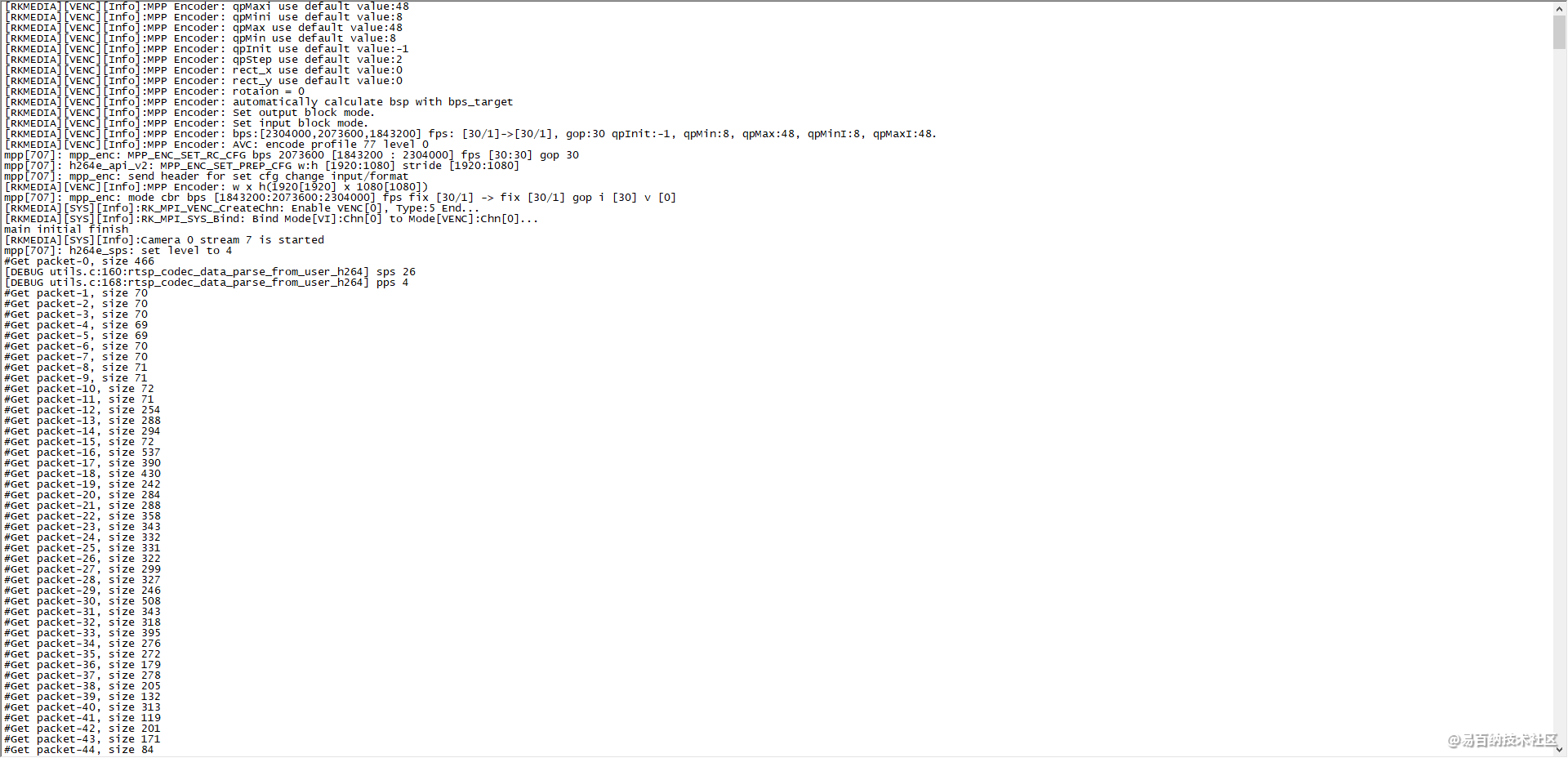
第五步:板端和适配的摄像头连接好以后,打开电脑的VLC软件,点击“媒体”,选择“打开网络串流” , 将流的地址 :(rtsp://192.168.100.85/live/main_stream) ,地址填自己板子的地址,然后点击播放就可以看到图像了,
如下图所示

串口测试参考此文章:https://www.ebaina.com/articles/140000015219
后续其他硬件测试再更新。
免责声明:文章内容来自互联网,本站仅提供信息存储空间服务,真实性请自行鉴别,本站不承担任何责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:EB-RV1126-DC-201开发手册V2.2.5版本SDK包 https://www.bxbdf.com/a/19913.shtml